Historia
En 1965, la compañía Fairchild Semiconductor introdujo en el mercado el uA709, el primer amplificador operacional monolítico ampliamente usado. Aunque disfrutó de un gran éxito, esta primero generación de amplificadores operacionales tenía muchas desventajas. Este hecho condujo a fabricar un amplificador operacional mejorado, el uA741. Debido a que es muy barato y sencillo de usar, el uA741 ha tenido un enorme éxito. Otros diseños del 741 han aparecido a partir de entonces en el mercado. Por ejemplo, Motorola produce el MC1741, National Semiconductor el LM741 y Texas Instruments el SN72741. Todos estos amplificadores operacionales son equivalentes al uA741, ya que tienen las mismas especificaciones en sus hojas de características. Para simplificar el nombre, la mayoría de la gente ha evitado los prefijos y a este amplificador operacional de gran uso se le llama simplemente 741


las características más importantes que posee este circuito integrado son las siguientes
- Alta impedancia (resistencia) de entrada: del orden de 1 MW , lo cual implica que la intensidad de corriente por los terminales de entrada será despreciable.
- Baja impedancia de salida: del orden de 150 W, pudiendo atacar cualquier carga (circuito) sin que su funcionamiento se modifique dependiendo del valor de ésta.
- Tensión máxima de alimentación: ±Vcc = ± 18 V. Implica que la tensión de salida nunca podrá superar a la de alimentación.
- Alta ganancia de tensión en lazo abierto (sin conectar ningún componente entre la salida y cualquiera de las entradas) con pequeños valores de tensión en los terminales de entrada se consiguen grandes tensiones de salida.
Tipos de amplificadores utilizados en la práctica.
Amplificador inversor.
Se llama amplificador inversor a este montaje porque la señal de salida es inversa de la de entrada, en polaridad, aunque puede ser mayor, igual o menor, dependiendo esto de la ganancia que le demos al amplificador en lazo cerrado. La señal se aplica al terminal inversor o negativo del amplificador y el positivo o no inversor se lleva a masa. La resistencia R2, que va desde la salida al terminal de entrada negativo, se llama de realimentación.

Amplificador no inversor.
El circuito del amplificador no inversor es muy parecido al inversor, la diferencia es que la señal se introduce por el terminal positivo o no inversor, lo cual va a significar que la señal de salida estará en fase con la señal de entrada y amplificada.

Amplificador buffer.
En el amplificador buffer, la tensión de la señal de entrada Vi es igual a la tensión de salida Vo, es decir, la señal de salida sigue a la de entrada, de ahí su nombre: Vo = Vi.

Se llama amplificador inversor a este montaje porque la señal de salida es inversa de la de entrada, en polaridad, aunque puede ser mayor, igual o menor, dependiendo esto de la ganancia que le demos al amplificador en lazo cerrado. La señal se aplica al terminal inversor o negativo del amplificador y el positivo o no inversor se lleva a masa. La resistencia R2, que va desde la salida al terminal de entrada negativo, se llama de realimentación.
Amplificador no inversor.
El circuito del amplificador no inversor es muy parecido al inversor, la diferencia es que la señal se introduce por el terminal positivo o no inversor, lo cual va a significar que la señal de salida estará en fase con la señal de entrada y amplificada.
Amplificador buffer.
En el amplificador buffer, la tensión de la señal de entrada Vi es igual a la tensión de salida Vo, es decir, la señal de salida sigue a la de entrada, de ahí su nombre: Vo = Vi.
Hoja de datos LM741
Link:
Objetivo de la practica:
- Usar un amplificador operacional realimentado negativamente, en configuración inversor.
- Medir tensiones de entrada y salida con multímetro y osciloscopio. Con este último tomar muestras de las señales medidas.
- Medir el comportamiento del amplificador inversor con tensiones continuas y alternas en su entrada.
- Calcular la ganancia del amplificador dentro de la zona lineal. Expresar su valor en veces y en dB.Graficar la función transferencia (Vo en función de Vs).
- Reconocer las zonas de saturación y de amplificación lineal.
- Medir la tensión residual de salida (offset).Apreciar las limitaciones de la ganancia en función de la frecuencia para dos tipos distintos de amplificadores operacionales.
Amplificador inversor(Primera parte)
Armado del circuito |
| Circuito montado en protoboard |
 |
| Circuito en proteus |
"Comportamiento en continua"
Medición del puente resistivo:
Valor mínimo entregado por el puente resistivo
(en 0% el preset de 1 k)
-1,74V
Valor maximo entregado por el puente resistivo
(en 100% el preset)
1,81V
Tabla de valores máximos y mínimos de Vs y Vo
variando el preset.

Gráfico obtenido con los valores de la tabla

Tabla de valores máximos y mínimos de Vs y Vo
variando el preset.
Gráfico obtenido con los valores de la tabla

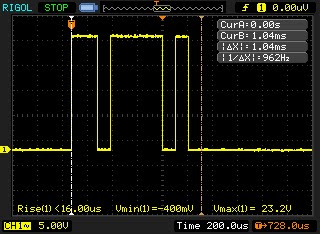
"Comportamiento en alterna"
Vo
 |
| Visualización de las tensiones pico a pico |
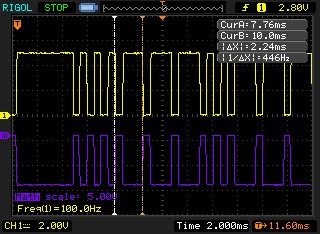
Aumentando la tensión
 |
| Vo: Azul Vi:Amarillo Recorte de la señal de salida aumentando la tensión de entrada |
Tensión minima


AO como comparador dentro de un uC(opcional)

PIC16F683.
R1: 330 Ω
R2: 10 KΩPotenciometro 10 KΩC1: 100 nF
1 Led rojo.
Características del PIC12F683.
Las características básicas de este microcontrolador son las siguiente:
- Dispone de varios tipos de memoria según su utilización:
* 2048 x 14 palabras de memoria FLASH como memoria de progama.
* 256 x 8 bytes de memoria EEPROM para guardar datos.
* 128 x 8 bytes de memoria SRAM para lso registros de propósito general.
- Oscilador interno de 8 MHz. Cada instrucción dura 4 periodos de oscilación, con lo cual una instrucción (1 ciclo) dura 0,25us.
- Dispone de 6 entradas/digital internos de 10 bits de resolución.
- 1 comparador analógico interno.
- 4 conversor analógico/digital internos de 10 bits respectivamente.
- 1 timer de 8 bits y otro de 16 con preescaler de 8 bits respectivamente (el preescaler permite que el timer no se incremente a cada ciclo de procesador sino cada n ciclos, siendo n el valor de preescaler).
- Función SLEEP para un mayor ahorro de energía.
- Watchdog (perro guardián) para evitar bucles infinitos.
Los consumos de este chip son los siguientes:
- Standby Current: 1nA a 2V, typical.
- Operating Current: 8,5 uA a 32 KHz, 2V, typical.
100 uA a 1 MHz, 2V, typical.
- Watchdog Timer Current: 1 uA a 2V, typical.